Voir le champ magnétique terrestre
sans perturber le drone qui le mesure
Concevoir une perche multicapteurs pour drone de relevés géomagnétiques : un casse-tête de mécanique où chaque gramme compte, et où la stabilité décide de tout.
Mesurer le champ magnétique terrestre, c’est plus compliqué qu’on le croit

Le champ magnétique terrestre, c’est invisible, mais il est partout. Les géologues le mesurent pour explorer le sous-sol, détecter les minerais, ou surveiller les anomalies. Jusqu’ici, ils utilisaient des instruments au sol, marchaient avec des capteurs, ou volaient en avion avec du matériel coûteux et immobile.
Depuis quelques années, les drones ont révolutionné ça. Un petit appareil volant équipé des bons capteurs peut cartographier une région entière en quelques heures. Le problème? Le drone lui-même est rempli de composants électroniques, de moteurs, de batteries tous magnétiques ou générateurs de champs. Un vrai cauchemar pour un capteur sensé mesurer le champ magnétique naturel avec précision.
La solution : éloigner les capteurs du drone
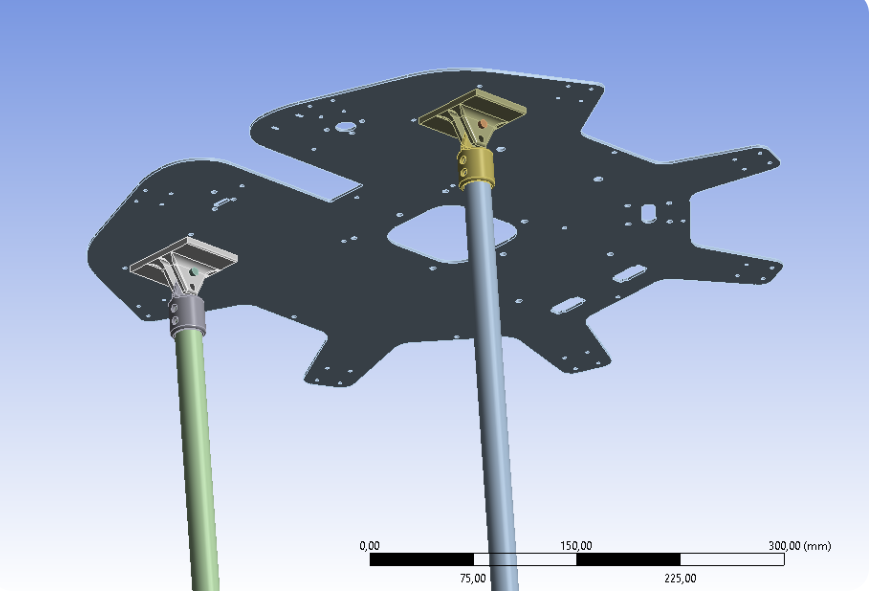
La réponse à ce problème, c’est étonnamment simple en théorie mais complexe en pratique : on éloigne les capteurs du drone. Pour ça, on fixe une longue perche rigide sous le fuselage, et on met les capteurs magnétiques tout au bout assez loin pour que le champ magnétique du drone soit dilué et moins perturbateur.
Mais une perche, c’est pas qu’un morceau de bois. Cette perche doit être rigide (pour que les capteurs ne bougent pas et faussent les mesures), légère (sinon le drone fatigue ses moteurs et perd en autonomie), sans vibrations (sinon les données sont bruyantes), et sans matériaux magnétiques (sinon elle crée elle-même du bruit magnétique). Et elle doit être démontable, pour que le drone puisse se plier dans un sac à dos.
Choisir les bons matériaux
Les matériaux jouent un rôle de premier plan. L’acier, par exemple, est magnétique à exclure totalement. L’aluminium, c’est léger et rigide, mais conductive électriquement, ce qui peut introduire du bruit. La fibre de carbone, c’est parfait : ultraléger, très rigide, non magnétique. Mais c’est aussi cher et plus difficile à usiner.
Le choix n’est pas évident. Il faut peser (littéralement) les avantages et les inconvénients, calculer les coûts, s’assurer que les matériaux choisis vont résister aux vibrations de vol, aux variations de température, à l’humidité. Une étude de matériaux n’est pas du luxe c’est la fondation de toute la conception.
Concevoir la géométrie : rigidité sans poids
Une fois les matériaux choisis, il faut concevoir la forme. Une perche pleine en fibre de carbone serait extrêmement lourde. Une perche creuse, c’est bien mieux on gagne en légèreté sans perdre en rigidité. Mais combien d’épaisseur de paroi ? Quel diamètre ? Où faut-il renforcer pour éviter les vibrations de résonance ?
C’est ici qu’intervient la simulation mécanique. L’ingénieur crée un modèle numérique de la perche, simule son comportement sous les vibrations du vol les rafales de vent, les oscillations du fuselage, les accélérations et décélérations et regarde où ça risque de casser ou de vibrer trop. Puis il ajuste : épaisseur ici, renfort là, géométrie différente ailleurs.
Vibrations et résonance : deux ennemis invisibles
Une perche qui vibre, c’est une catastrophe pour les mesures magnétiques. Les capteurs bougent, les données deviennent bruyantes, on perd de la précision. Il y a deux types de vibrations à considérer. D’abord, les vibrations passives celles induites par le vol lui-même, le bruit mécanique des moteurs. Ensuite, les résonances les fréquences naturelles de la perche qui amplifient certaines vibrations, comme une corde de guitare qu’on pince.
L’objectif est de concevoir une perche dont les fréquences de résonance sont soit très basses (en dehors de la gamme des vibrations du drone), soit très hautes (où aucune force du drone ne peut la faire osciller). C’est un équilibre délicat : trop rigide, ça pèse ; trop souple, ça vibre.
Solutions passives ou actives : deux philosophies
Il existe deux approches pour minimiser les vibrations. La méthode passive consiste à bien concevoir la géométrie et les matériaux un design qui absorbe naturellement les vibrations sans aucun composant électronique supplémentaire. C’est plus simple, plus robuste, et ça n’ajoute pas de poids.
La méthode active utilise des systèmes motorisés ou amortisseurs électroniques qui contrent les vibrations en temps réel. Par exemple, un système de suspension active peut détecter les vibrations et appliquer une force contraire pour les annuler. C’est plus sophistiqué et plus efficace, mais ça consomme de l’électricité et ajoute de la complexité.
Le choix dépend des contraintes du projet : budget, autonomie du drone, précision requise. Souvent, les deux approches sont combinées — une base de design passif solide, avec quelques éléments actifs pour affiner.
La démontabilité : un défi souvent oublié
Une dernière contrainte : la perche doit être démontable. Un drone se range dans un sac, et une perche d’un mètre de long ne rentre pas. Il faut donc concevoir une structure qui se divise en sections, qui se clippe ou se visse ensemble sans jeu, et qui reprend exactement la même position à chaque montage. Sinon, les capteurs ne seront jamais au même endroit, et les mesures ne seront pas comparables d’un vol à l’autre.
C’est un défi de mécanique de précision en soi : comment faire des connections sans jeu, sans outils complexes, tout en restant léger et rapide ? Des connecteurs intelligents, de la tolérance zéro, de la conception minutieuse c’est ça qui séparent les bons designs des prototypes qui fonctionnent une fois et qu’on ne remonte jamais.
De la théorie à la validation en conditions réelles
Une fois la perche conçue en 3D, simulée et validée numériquement, il faut la tester. D’abord au sol, dans des souffleries ou sur des vibreurs mécaniques, pour mesurer les vibrations et confirmer que la théorie colle à la réalité. Ensuite en vol, pour voir comment ça se comporte réellement avec un drone vrai dans des conditions météo réelles.